 16/12/2021 - Pacientes tetraplégicos são prisioneiros de seus próprios corpos, incapazes de falar ou realizar o menor movimento. Os pesquisadores vêm trabalhando há anos para desenvolver sistemas que possam ajudar esses pacientes a realizar algumas tarefas por conta própria. "Pessoas com lesão na medula espinhal costumam apresentar déficits neurológicos permanentes e deficiências motoras graves que os impedem de realizar até as tarefas mais simples, como agarrar um objeto", disse o Prof. Aude Billard, ...
16/12/2021 - Pacientes tetraplégicos são prisioneiros de seus próprios corpos, incapazes de falar ou realizar o menor movimento. Os pesquisadores vêm trabalhando há anos para desenvolver sistemas que possam ajudar esses pacientes a realizar algumas tarefas por conta própria. "Pessoas com lesão na medula espinhal costumam apresentar déficits neurológicos permanentes e deficiências motoras graves que os impedem de realizar até as tarefas mais simples, como agarrar um objeto", disse o Prof. Aude Billard, ...
chefe do Laboratório de Sistemas e Algoritmos de Aprendizagem da EPFL. "A assistência de robôs pode ajudar essas pessoas a recuperar parte da destreza perdida, já que o robô pode executar tarefas em seu lugar." O Prof. Billard realizou um estudo com o Prof. José del R. Millán, que na época era chefe do laboratório de Interface Cérebro-Máquina da EPFL, mas desde então se mudou para a Universidade do Texas. Os dois grupos de pesquisa desenvolveram um programa de computador que pode controlar um robô usando sinais elétricos emitidos pelo cérebro de um paciente. Nenhum controle de voz ou função de toque é necessário; os pacientes podem mover o robô simplesmente com seus pensamentos. O estudo foi publicado na Communications Biology.
Evitando obstáculos
Para desenvolver seu sistema, os pesquisadores começaram com um braço robótico desenvolvido há vários anos. Este braço pode se mover para frente e para trás da direita para a esquerda, reposicionar objetos na frente dele e contornar os objetos em seu caminho. “Em nosso estudo, programamos um robô para evitar obstáculos, mas poderíamos ter selecionado qualquer outro tipo de tarefa, como encher um copo d'água ou empurrar ou puxar um objeto”, diz o Prof. Billard.
Os engenheiros começaram melhorando o mecanismo do robô para evitar obstáculos para que fosse mais preciso. “No início, o robô escolhia um caminho largo demais para alguns obstáculos, levando-o para longe, e não largo o suficiente para outros, mantendo-o próximo demais”, diz Carolina Gaspar Pinto Ramos Correia, a Ph.D. aluno do laboratório do Prof. Billard. "Como o objetivo do nosso robô era ajudar pacientes paralisados, tivemos que encontrar uma maneira de os usuários se comunicarem com ele que não exigisse falar ou se mover."
Um algoritmo que pode aprender com os pensamentos
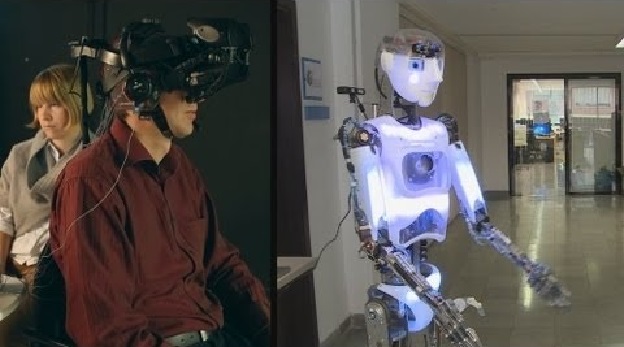
Isso envolveu o desenvolvimento de um algoritmo que pudesse ajustar os movimentos do robô com base apenas nos pensamentos do paciente. O algoritmo foi conectado a um capacete equipado com eletrodos para executar varreduras de eletroencefalograma (EEG) da atividade cerebral de um paciente. Para usar o sistema, tudo que o paciente precisa fazer é olhar para o robô. Se o robô fizer um movimento incorreto, o cérebro do paciente emitirá uma "mensagem de erro" por meio de um sinal claramente identificável, como se o paciente dissesse "Não, não é assim". O robô então entenderá que o que está fazendo é errado - mas a princípio não saberá exatamente o porquê.
Leia também - A pele eletrônica inédita imita a resposta humana à dor
Por exemplo, ele ficou muito perto ou muito longe do objeto? Para ajudar o robô a encontrar a resposta certa, a mensagem de erro é alimentada no algoritmo, que usa uma abordagem de aprendizado por reforço inverso para descobrir o que o paciente deseja e quais ações o robô precisa realizar. Isso é feito por meio de um processo de tentativa e erro, no qual o robô tenta diferentes movimentos para ver qual é o correto. O processo é muito rápido - geralmente são necessárias apenas três a cinco tentativas para o robô descobrir a resposta certa e executar os desejos do paciente. “O programa de IA do robô pode aprender rapidamente, mas você tem que avisá-lo quando ele comete um erro para que ele possa corrigir seu comportamento”, diz o Prof. Millán.
"O desenvolvimento da tecnologia de detecção de sinais de erro foi um dos maiores desafios técnicos que enfrentamos." Iason Batzianoulis, o principal autor do estudo, acrescenta: "O que foi particularmente difícil em nosso estudo foi ligar a atividade cerebral de um paciente ao sistema de controle do robô - ou em outras palavras, 'traduzir' os sinais cerebrais de um paciente em ações realizadas pelo robô. Nós fizemos isso usando o aprendizado de máquina para vincular um determinado sinal do cérebro a uma tarefa específica. Em seguida, associamos as tarefas aos controles individuais do robô para que o robô faça o que o paciente tem em mente. "
Próxima etapa: uma cadeira de rodas controlada pela mente
Os pesquisadores esperam usar seu algoritmo para controlar cadeiras de rodas. "Por enquanto, ainda há muitos obstáculos de engenharia a serem superados", diz o Prof. Billard. "E as cadeiras de rodas representam um conjunto inteiramente novo de desafios, já que tanto o paciente quanto o robô estão em movimento." A equipe também planeja usar seu algoritmo com um robô que pode ler vários tipos diferentes de sinais e coordenar os dados recebidos do cérebro com os das funções motoras visuais.
Fonte: https://techxplore.com/