 05/07/2020, por Bill Schweber - Este sistema robótico médico quase autônomo usa imagens ultrassônicas para localizar uma veia adequada do antebraço, em seguida, insere uma agulha no ângulo e distância críticos e, finalmente, extrai uma amostra de sangue. Inserir uma agulha na veia do braço de alguém e tirar uma amostra de sangue, ou inserir uma linha intravenosa, é um procedimento médico comum e muitas vezes uma primeira etapa essencial no atendimento ao paciente.
05/07/2020, por Bill Schweber - Este sistema robótico médico quase autônomo usa imagens ultrassônicas para localizar uma veia adequada do antebraço, em seguida, insere uma agulha no ângulo e distância críticos e, finalmente, extrai uma amostra de sangue. Inserir uma agulha na veia do braço de alguém e tirar uma amostra de sangue, ou inserir uma linha intravenosa, é um procedimento médico comum e muitas vezes uma primeira etapa essencial no atendimento ao paciente.
O desafio de obter acesso venoso bem-sucedido varia de fácil a muito difícil, dependendo das veias e da fisiologia do sujeito, bem como da habilidade do técnico médico. Muitas vezes, termina em um resultado frustrante e malsucedido que requer novas tentativas, atrasos e até mesmo ajuda adicional.
Esse procedimento clínico é realizado mais de 1,4 bilhão de vezes ao ano nos Estados Unidos. No entanto, de acordo com estudos clínicos, falha em 27% dos pacientes sem veias visíveis, 40% dos pacientes sem veias palpáveis e 60% dos pacientes emaciados. A instrumentação com imagem de ultrassom está disponível para ajudar os médicos a localizar a veia, mas a inserção manual da agulha sob a orientação do ultrassom requer uma coordenação cuidadosa entre mãos e olhos para posicionamento e controle constantes da sonda e da agulha. Os sistemas de imagem no infravermelho próximo (NIR) também são usados, mas eles têm uma profundidade de penetração de apenas cerca de 3 mm e tendem a ser ineficazes em pacientes obesos.
Leia também - ENIAC e as primeiras programadoras
Dispositivo de punção venosa
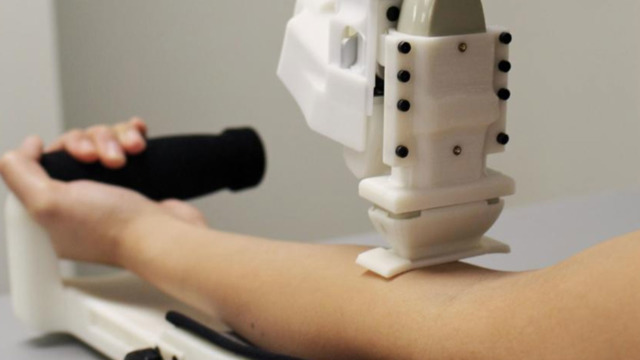
Agora, uma equipe baseada na Rutgers University desenvolveu e está testando em campo um sistema robótico quase autônomo que localiza uma veia adequada, insere a agulha e até mesmo coleta uma amostra de sangue. Este dispositivo de punção venosa é projetado para realizar com segurança a coleta de sangue nas veias periféricas do antebraço. O sistema combina imagens de ultrassom e robótica miniaturizada para identificar vasos adequados para canulação e guiar roboticamente uma agulha em direção ao que é chamado de centro do lúmen.
Um clínico faz a configuração do posicionamento geral da máquina em relação ao braço do sujeito, esterilizando / limpando a zona alvo, aplicando hidrogel de ultrassom e selecionando o centro da veia alvo conforme exibido em um monitor. Essas coordenadas são então usadas pelo dispositivo para determinar a cinemática necessária para garantir que a ponta da agulha cruzou o plano de imagem de ultrassom no centro do vaso. Uma vez alinhado e estável, o operador então inicia o procedimento de inserção e o carro do eixo de injeção conduz a ponta da agulha anexada para frente em um ângulo de 25 graus em relação ao antebraço do participante para o alvo do centro da veia, insere a agulha e puxa uma amostra de sangue de 5 ml.
Configuração do sistema
O sistema consiste em dois conjuntos mecânicos principais: uma sonda de ultrassom bidimensional em um carro de movimento linear e o impulso de agulha unidimensional, ambos ligados por um microcontrolador para controle coordenado (Fig. 1).
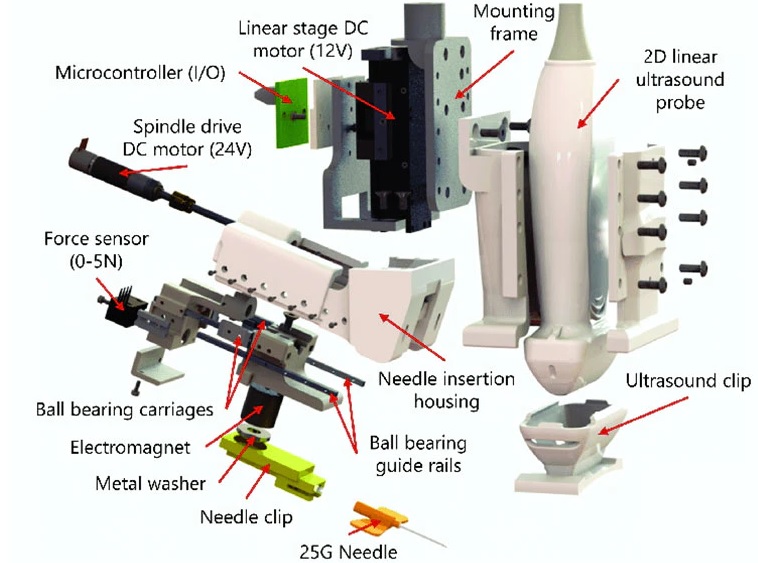
Visão explodida e principais componentes funcionais do dispositivo portátil de punção venosa.
A orientação e a execução da tarefa empregam uma combinação de perfis de feedback de força vs. deslocamento, juntamente com imagens ultrassônicas (Fig. 2). A análise em tempo real dos dados do perfil indica o provável sucesso do procedimento, incluindo o "avanço" súbito desejável que ocorre quando a força cai repentinamente em uma curta distância quando a parede da veia é perfurada.
Leia também - Como funciona a bioimpressão 3D de órgãos?
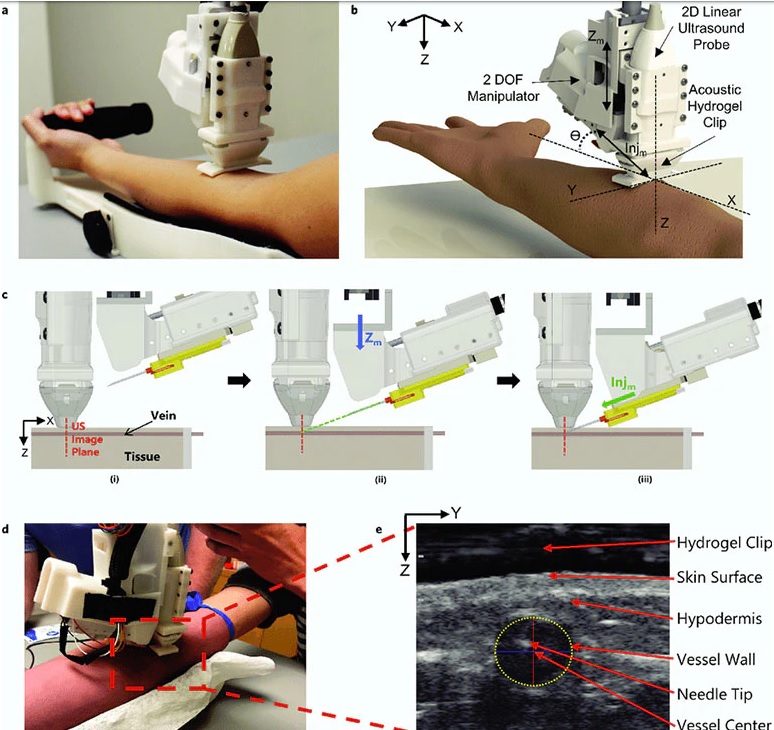
Configuração e operação do dispositivo robótico: (a) Dispositivo de punção venosa portátil. (b) Projeto auxiliado por computador (CAD) exibindo os principais componentes do dispositivo de dois graus de liberdade (DoF). O ângulo de inserção (θ) é fixado em 25 graus. (c) Operação do dispositivo: (i) O plano de imagem de ultrassom (US) fornece uma vista em corte transversal do vaso alvo. (ii) Uma vez que um vaso é localizado pelo dispositivo, a agulha é alinhada através do motor de movimento do eixo Z (Zm) DoF; o motor Zm (seta azul) é responsável por alinhar a trajetória da agulha com a profundidade do vaso (eixo Z) para garantir que a ponta da agulha alcance o centro do vaso exatamente no plano de imagem do ultrassom. (iii) Uma vez que a trajetória está alinhada, a agulha é inserida por meio do motor de movimento de injeção (Inj m) DoF (seta verde) e automaticamente interrompida quando a ponta atinge o centro do vaso. (d) Dispositivo posicionado sobre a parte superior do antebraço durante o estudo. (e) Imagem de ultrassom mostrando a ponta da agulha presente no vaso-alvo após uma punção venosa bem-sucedida. A parede do vaso é identificada por uma elipse tracejada amarela. O eixo Z na imagem indica a profundidade do vaso e o eixo Y indica a posição sagital do vaso. As posições do vaso e da ponta da agulha são registradas em relação à cabeça do transdutor de ultrassom (parte superior da imagem).
Se o perfil de força / distância indicar que a tentativa será malsucedida (as veias não são rígidas, é claro, e podem se mover ou rolar durante o processo) ou se não houver fluxo de sangue, a agulha se retira e o operador guia a máquina para uma nova possibilidade local. Uma interface gráfica do usuário mostra a imagem do ultrassom, o sensor de força, a velocidade do motor de injeção e os perfis de posição para os motores de eixo Z e de injeção (Fig. 3).
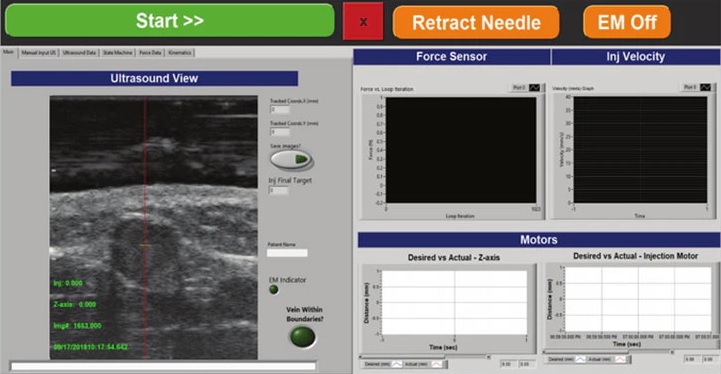
As principais exibições da interface gráfica do usuário (GUI) para o software do dispositivo de punção venosa portátil incluem o fluxo de imagem do ultrassom, o sensor de força, a velocidade do motor de injeção e a posição desejada versus a posição real para os motores de eixo Z e de injeção. A linha vermelha na imagem do ultrassom é a trajetória da agulha. É aqui que a agulha cruzará o plano de imagem do ultrassom. O usuário tem a tarefa de posicionar manualmente o dispositivo de forma que o vaso com imagem (elipse escura) seja centralizado com a linha de trajetória da agulha.
Eficácia
Os resultados até agora em um número limitado de assuntos de teste são favoráveis e comparáveis ou melhores do que os padrões clínicos. A taxa de sucesso geral foi de 87% em todos os 31 participantes e 97% nos 25 participantes que tinham veias de fácil acesso, com um tempo médio de procedimento de 93 ± 30 segundos.
Os pesquisadores observam que as versões futuras deste dispositivo do sistema podem ser estendidas a outras áreas de acesso vascular, como cateterismo IV, acesso venoso central, diálise e colocação de linha arterial. Além disso, o sistema pode ser combinado com um subsistema de avaliação de sangue integral para um arranjo de coleta de sangue e resultado de teste "tudo em um".
Leia também - Baterias da Tesla podem ameaçar rede elétrica tradicional
Os detalhes do projeto estão no artigo da equipe "Avaliação em primeiro lugar em humanos de um dispositivo de punção venosa automático portátil para coleta de sangue venoso rápido" publicado na Technology (World Scientific). Ele se concentra principalmente nos dados do sensor, perfis, algoritmos e resultados e com menos discussão sobre a construção real da máquina. Embora esse papel esteja atrás de um acesso pago, também está disponível aqui como uma página HTML com um link para um arquivo PDF para download.
robô vampiro, médico, veia, humana, agulha, sangue, sistema robótico, imagens ultrassônicas, paciente, procedimento clínico, ultrassom, punção venosa, projetado, coleta de sangue, sistema, bidimenssional, agulha, oreintação, feedback, dsipositivo, vaso, perfil, interface, eficácia, pesquisas, avaliação, sensor, download
Fonte: https://www.electronicdesign.com/